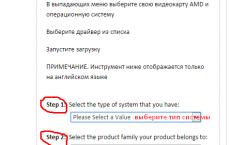
Technológiai folyamatok automatizálása. Folyamatautomatizálási eszközök
A termelési folyamatok automatizálása a fő irány, amely mentén a termelés jelenleg az egész világon halad. Minden, amit korábban maga az ember látott el, funkciói, nemcsak fizikai, hanem szellemi is, fokozatosan átkerülnek a technológiába, amely maga hajtja végre a technológiai ciklusokat és irányítja azokat. Ez most az általános irány modern technológiák. Az ember szerepe sok iparágban már csak egy vezérlőre redukálódik az automatikus vezérlő mögött.
Általában a „technológiai folyamatvezérlés” fogalma alatt a folyamat elindításához, leállításához, valamint a szükséges fizikai mennyiségek (folyamatjelzők) fenntartásához vagy megváltoztatásához szükséges műveletek összességét értjük. Az egyes gépeket, egységeket, eszközöket, eszközöket, gépegyütteseket és olyan technológiai folyamatokat végrehajtó eszközöket, amelyek vezérlésre szorulnak, az automatizálásban vezérlési objektumoknak vagy irányított objektumoknak nevezzük. A kezelt objektumok rendeltetésükben nagyon változatosak.
Technológiai folyamatok automatizálása– a mechanizmusok, gépek vezérlésére fordított emberi fizikai munka helyettesítése speciális eszközök munkájával, amelyek ezt az irányítást biztosítják (különböző paraméterek szabályozása, adott termelékenység és termékminőség elérése emberi beavatkozás nélkül).
A termelési folyamatok automatizálása lehetővé teszi a munka termelékenységének többszörös növelését, biztonságának, környezetbarátságának növelését, a termékek minőségének javítását és a termelési erőforrások hatékonyabb kihasználását, beleértve az emberi potenciált is.
Minden technológiai folyamatot egy meghatározott cél elérése érdekében hoznak létre és hajtanak végre. A végtermék gyártása, vagy köztes eredmény elérése. Így az automatizált gyártás célja lehet egy termék válogatása, szállítása, csomagolása. A gyártás automatizálása lehet teljes, összetett vagy részleges.

Részleges automatizálás akkor fordul elő, ha egy műveletet vagy egy külön gyártási ciklust hajtanak végre automatikusan. Ugyanakkor korlátozott emberi részvétel megengedett. Leggyakrabban a részleges automatizálás akkor következik be, amikor a folyamat túl gyorsan megy végbe ahhoz, hogy maga az ember teljes mértékben részt vehessen benne, miközben az elektromos berendezések által hajtott meglehetősen primitív mechanikus eszközök jól megbirkóznak vele.
A részleges automatizálást általában a meglévő berendezéseken használják, és kiegészítik azt. A legnagyobb hatékonyságot azonban akkor mutatja, ha kezdettől fogva a teljes automatizálási rendszer része - azonnal kifejlesztik, legyártják és alkatrészként telepítik.
Átfogó automatizálás külön nagy termelési területet kell lefednie, ez lehet külön műhely vagy erőmű. Ebben az esetben a teljes termelés egyetlen összekapcsolt automatizált komplexum üzemmódjában működik. A termelési folyamatok komplex automatizálása nem mindig célszerű. Felhasználási területe a modern magasan fejlett gyártás, amely rendkívül igénybe veszimegbízható berendezés.
Az egyik gép vagy egység meghibásodása azonnal leállítja a teljes gyártási ciklust. Az ilyen termelésnek önszabályozással és önszerveződéssel kell rendelkeznie, amelyet egy korábban létrehozott program szerint hajtanak végre. Ebben az esetben egy személy csak állandó vezérlőként vesz részt a gyártási folyamatban, figyelemmel kíséri a teljes rendszer és egyes részeinek állapotát, és beavatkozik a gyártásba az indításhoz, valamint vészhelyzetek felmerülésekor, vagy veszély esetén. egy ilyen eseményről.

A gyártási folyamatok legmagasabb szintű automatizálása teljes automatizálás. Ezzel a rendszer nem csak a gyártási folyamatot végzi, hanem annak teljes ellenőrzését is, amelyet automatikus vezérlőrendszerek hajtanak végre. A teljes automatizálásnak van értelme a költséghatékony, fenntartható termelésben technológiai folyamatokállandó üzemmóddal.
A normától való minden lehetséges eltérést előre előre kell látni, és az ellenük való védekezést szolgáló rendszereket kell kidolgozni. Teljes automatizálásra van szükség olyan munkáknál is, amelyek veszélyeztethetik az emberi életet, egészségét, vagy számára elérhetetlen helyen - víz alatt, agresszív környezetben, űrben - végzik.
Minden rendszer olyan komponensekből áll, amelyek meghatározott funkciókat látnak el. Egy automatizált rendszerben az érzékelők leolvasásokat vesznek és továbbítanak, hogy döntést hozzanak a rendszervezérlésről; a parancsot a hajtás hajtja végre. Leggyakrabban elektromos berendezésekről van szó, mivel célszerűbb a parancsokat elektromos áram segítségével végrehajtani.

Különbséget kell tenni az automatizált vezérlőrendszerek és az automatikus rendszerek között. Nál nél automatizált vezérlőrendszer az érzékelők leolvasást továbbítanak a kezelői konzolra, és ő, miután meghozta a döntést, továbbítja a parancsot a végrehajtó berendezésnek. Nál nél automatikus rendszer– a jelet elektronikus eszközök elemzik, majd döntést követően parancsot adnak a végrehajtó eszközöknek.
Az automata rendszerekben továbbra is szükség van emberi részvételre, bár vezérlőként. Bármikor képes beavatkozni a technológiai folyamatba, korrigálni vagy megállítani.
Így előfordulhat, hogy a hőmérséklet-érzékelő meghibásodik, és hibás értékeket ad. Ebben az esetben az elektronika megbízhatónak tekinti adatait anélkül, hogy megkérdőjelezné azokat.
Az emberi elme sokszor felülmúlja az elektronikai eszközök képességeit, bár válaszsebesség tekintetében elmarad tőlük. A kezelő megértheti, hogy az érzékelő hibás, felmérheti a kockázatokat, és egyszerűen kikapcsolhatja a folyamat megszakítása nélkül. Ugyanakkor teljesen biztosnak kell lennie abban, hogy ez nem vezet balesethez. A gépek számára hozzáférhetetlen tapasztalat és intuíció segíti a döntésben.
Az automata rendszerekbe történő ilyen célzott beavatkozás nem jár komoly kockázattal, ha szakember dönt. Az összes automatizálás kikapcsolása és a rendszer kézi vezérlési módba kapcsolása azonban súlyos következményekkel jár, mivel az ember nem tud gyorsan reagálni a változó körülményekre.
Klasszikus példa erre a csernobili atomerőmű balesete, amely a legnagyobb lett ember okozta katasztrófa múlt század. Ez éppen az automata üzemmód kikapcsolása miatt következett be, amikor a már kidolgozott vészhelyzet-megelőző programok nem tudták befolyásolni a helyzet alakulását az erőmű reaktorában.

Az egyes folyamatok automatizálása az iparban már a 19. században elkezdődött. Elég csak felidézni a Watt által tervezett gőzgépek automatikus centrifugális szabályozóját. De csak a villamos energia ipari felhasználásának kezdetével vált lehetővé a szélesebb körű automatizálás, nem az egyes folyamatok, hanem a teljes technológiai ciklusok esetében. Ez annak a ténynek köszönhető, hogy korábban a mechanikai erőt a sebességváltókkal és hajtásokkal továbbították a gépekre.
A villamos energia központosított előállítása és ipari felhasználása általában csak a huszadik században kezdődött - az első világháború előtt, amikor minden gépet saját villanymotorral szereltek fel. Ez a körülmény tette lehetővé, hogy ne csak a gyártási folyamatot gépesítsék a gépen, hanem a vezérlését is. Ez volt az első lépés az alkotás felé automata gépek. Az első minták az 1930-as évek elején jelentek meg. Aztán felmerült maga az „automatizált gyártás” kifejezés.
Oroszországban - akkor még a Szovjetunióban - a múlt század 30-40-es éveiben megtették az első lépéseket ebbe az irányba. A csapágyalkatrészek gyártásához először használtak automata gépeket. Ezután következett a világ első teljesen automatizált traktormotorok dugattyúinak gyártása.
A technológiai ciklusokat egyetlen automatizált folyamattá egyesítették, kezdve az alapanyagok berakásával és a kész alkatrészek csomagolásával. Ez az akkori modern elektromos berendezések, a különféle relék, távkapcsolók, és természetesen a meghajtók széles körű elterjedésének köszönhetően vált lehetővé.
És csak az első elektronikus számítógépek megjelenése tette lehetővé az automatizálás új szintjének elérését. Mostanra a technológiai folyamatot már nem csupán egyedi műveletek gyűjteményének tekintik, amelyeket egy bizonyos sorrendben kell végrehajtani az eredmény eléréséhez. Most az egész folyamat eggyé vált.
Jelenleg az automatikus vezérlőrendszerek nemcsak a gyártási folyamatot vezetik le, hanem irányítják azt és figyelik a rendellenes és vészhelyzetek előfordulását. Beindítják és leállítják a technológiai berendezéseket, figyelik a túlterheléseket, baleset esetén intézkednek.
BAN BEN Utóbbi időben az automatikus vezérlőrendszerek meglehetősen egyszerűvé teszik a berendezések átépítését új termékek előállításához. Ez már egy egész rendszer, amely egy központi számítógéphez kapcsolódó különálló automatikus többmódú rendszerekből áll, amelyek egyetlen hálózatba kapcsolják őket, és feladatokat adnak ki végrehajtásra.
Minden alrendszer egy külön számítógép, amely sajátja szoftver saját feladatai ellátására tervezték. Ez már rugalmas gyártási modulok. Rugalmasnak nevezik őket, mert átkonfigurálhatók más technológiai folyamatokhoz, és ezáltal bővíthetők és diverzifikálhatók a termelés.
Az automatizált gyártás csúcsa. Az automatizálás tetőtől talpig áthatotta a termelést. A termeléshez szükséges alapanyagok szállítására szolgáló szállítósor automatikusan működik. Automatizált menedzsment és tervezés. Az emberi tapasztalatot és intelligenciát csak ott használják, ahol az elektronika nem tudja helyettesíteni.
Tanult már „technológiai folyamatok és gyártás automatizálását”, de nem is gondolja, milyen munkát fog végezni? Ez valószínűleg komoly hiányosságokat jelez az oktatásban, de próbáljuk meg együtt megérteni a kérdést. Naponta használjuk automatizált rendszerek anélkül, hogy észrevenné.
Az automatizálás szükségessége – megvan?
Bármilyen gyártási folyamat az erőforrások pazarlása. Az új technológiáknak és gyártási módszereknek köszönhetően megtakaríthatjuk a termékek előállításához felhasznált alapanyagok és üzemanyagok mennyiségét.
De mi a helyzet az emberi erőforrásokkal? Végtére is, a magasan képzett szakemberek más projektek megvalósítására is felhasználhatók, és a szállítószalag munkások általi irányítása maga is drága öröm, ami megnöveli a végtermék árát.
A problémát néhány évszázaddal ezelőtt részben megoldották a gőzgépek és a szállítószalag-gyártás feltalálásával. De még most is a volt Szovjetunió legtöbb műhelyében még mindig túl sok a dolgozó. És a többletköltségek mellett ez tele van az „emberi tényezővel”, amely a legtöbb felmerülő probléma fő oka.

Mérnök vagy 5 másik szakterület?
Miután diplomát kapott az érettségi után, megteheti pozícióra számíthat:
- Mérnök.
- Tervező.
- Tervező.
- Kutató.
- Fejlesztési Osztály vezetője.
- Üzemeltetési osztály alkalmazottja.
A mérnök szakma az volt divatos évek 40 évvel ezelőtt ma kevesen voltak készek a fejükkel gondolkodni és felelősséget vállalni. Természetesen a diplomáddal nagyon szűk szakember leszel, a fő feladatok között szerepel majd új irányítási és irányítási rendszerek bevezetése és fejlesztése a termelésben.
De leggyakrabban nem kell mást tenni, mint a teljes rendszert működőképes állapotban tartani, a felmerülő kisebb hibákat kijavítani és a munkát tovább tervezni.
A rendszer optimalizálására vagy frissítésére irányuló minden projekt közvetlen felettesek vezetése alatt, az egész osztály erőfeszítései révén valósul meg. Szóval ne aggódj, már az első napon nem leszel kénytelen valami innovatív megoldást kidolgozni vagy teljesen új irányítási módszert bevezetni. A szakemberekkel szemben támasztott követelmények meglehetősen megfelelőek, bér régiótól és iparágtól függ.

A projekt kidolgozása és tervezése.
U tervezők és kivitelezők a feladatok kissé eltérőek. Már csinálják új projektek, szinte minden fejlesztési szakaszban. Mindenekelőtt ezeknek a munkatársaknak kell megfogalmazniuk és kitűzniük a feladatot.
Amikor meghatározták a jövőbeni munka célját és terjedelmét, megkezdik az összeállítást általános terv a jövőbeli projekt megvalósítása. A tervezőnek csak ezt követően van joga a részletesebb tervek elkészítésére, az építészet fejlesztésére és az eszközök kiválasztására.
És tovább végső szakasz Ugyanezen mérnökök számára dokumentációt is kell készíteni.
A tervező munkája nem sokban tér el az adott munkatervtől, így nincs értelme erre koncentrálni. Csak azt mondhatjuk, hogy e két szakma képviselői valamivel közelebb állnak az elmélethez és a tudományhoz, de továbbra is közvetlen kapcsolatot tartanak fenn a termeléssel, és jól ismerik munkájuk végtermékét.

Kutatók a gyártásautomatizálás területén.
És most itt az ideje, hogy beszéljünk azokról, akik szeretik a fehér köpenyt és a tudományos laboratóriumokat. Valójában arról beszélünk matematika a legtisztább formájában. Modellek tervezése, létrehozása, fejlesztése, új algoritmusok. Az ilyen elméleti problémák megoldásának képessége, néha a valóságtól kissé elszakadva, még az iskolában vagy az egyetemen is megnyilvánul. Ha ezt észreveszed magadon, akkor kellően fel kell mérned képességeidet, és keress magadnak helyet egy kutatóközpontban.
A magánszemélyek ajánlatai magasabb fizetésűek, de a legtöbb cégnek minden jogot meg kell szereznie az Ön szellemi tevékenységének eredményeihez. Kormányzati struktúrában dolgozva tud vezetni tudományos tevékenység, nagyobb az esély arra, hogy valamilyen elismerést szerezzenek a kollégák körében. A kérdés csak az, hogy helyesen állítsa fel a prioritásokat.

Vezetői pozíciók és személyes felelősség.
Osztályi vagy projektmenedzseri pozícióra két esetben számíthat:
- Kísérlet arra, hogy kegyességet szerezzen az ember ambícióinak és törekvéseinek megvalósításával.
- Magas szintű felelősségvállalás és személyes készségek.
Az első pont nem fog megfelelni neked közvetlenül az egyetem után, fiatal szakember Nem fognak rád bízni egy komoly pozíciót, és bizonyos tapasztalat és tudás nélkül nem fogod tudni megoldani. De problémás lesz valaki másra hárítani a felelősséget a kudarcért.
Tehát csak azt tudd, hogy ha minőségileg és időben látod el feladataidat, számíthatsz a szakmai előmenetelre, a diplomád ezt lehetővé teszi. Ezért a hatóságok semmilyen érve az oktatási szint eltéréseiről nem fog működni. De gondoljon arra, hogy megéri-e - a felelősségek növekedni fognak, és a felelősség szintje észrevehetően emelkedni fog.

A Technológiai Folyamat- és Termelésautomatizálási Kar szakemberei már első éveiktől tudják, hogy kivel kell együtt dolgozni. Ne légy zavarban, ha munkahely ismerőseinek köszönhetően sikerült megszerezni. Egy haszontalan szakembert senki sem fog felelős pozícióban tartani, ezért ez nem túl nyomós érv.
Videó a szakmáról
Következő, a videóban a „Jövő Szakorvosai” program keretében szóba kerül, hogy a Technológiai Folyamat- és Termelésautomatizálási Kar elvégzése után kikkel dolgozzon együtt. Mik ennek a szakmának az árnyalatai, előnyei és hátrányai:
ESZKÖZÖK TECHNOLÓGIAI FOLYAMATOK AUTOMATIZÁLÁSÁRA
A technológiai folyamat automatizálásának eszközén olyan technikai eszközök összességét értjük, amelyek adott kinematikai paraméterekkel (pályák és mozgástörvények) biztosítják a gép végrehajtó (munka) szerveinek mozgását. Ezt a problémát általában egy vezérlőrendszer (CS) és a munkatest meghajtása oldja meg. Az első automatákban azonban nem lehetett külön modulokra szétválasztani a hajtásokat és a vezérlőrendszert. Egy ilyen gép felépítésére egy példa látható az 1. ábrán.
A gép a következőképpen működik. Az aszinkron villanymotor a vezérműtengelyt folyamatos forgásba hajtja a fő erőátviteli mechanizmuson keresztül. Ezután a mozgásokat a megfelelő tolóelemek továbbítják az 1...5 erőátviteli mechanizmusokon keresztül az 1...5 munkatestekhez. A vezérműtengely nemcsak a mechanikai energia átvitelét biztosítja a munkatestekhez, hanem programhordozóként is szolgál, ez utóbbiak mozgását időben koordinálja. Egy ilyen felépítésű gépben a hajtások és a vezérlőrendszer egyetlen mechanizmusba van integrálva. A fenti struktúra megfelelhet például a 2. ábrán bemutatott kinematikai diagramnak.

Egy hasonló célú és megfelelő teljesítményű gép elvileg a 3. ábrán látható blokkvázlattal rendelkezhet.

A 3. ábrán látható gép a következőképpen működik. A vezérlőrendszer parancsokat ad ki az 1...5 meghajtóknak, amelyek 1...5 munkatesteket mozgatnak a térben. Ebben az esetben a vezérlőrendszer koordinálja a pályákat térben és időben. A gép fő jellemzője itt egy egyértelműen dedikált vezérlőrendszer és hajtások jelenléte minden egyes munkaelemhez. Általános esetben a gép tartalmazhat olyan érzékelőket, amelyek az ésszerű parancsok kidolgozásához szükséges információkkal látják el a vezérlőrendszert. Az érzékelőket általában a munkaelem elé vagy után helyezik el (helyzetérzékelők, gyorsulásmérők, szögsebesség-érzékelők, erő-, nyomás-, hőmérséklet-érzékelők stb.). Néha az érzékelők a meghajtó belsejében helyezkednek el (a 3. ábrán az információátviteli csatorna szaggatott vonallal látható), és vezérlést biztosítanak további információ(áramérték, nyomás a hengerben, áramváltozás sebessége stb.), ami a szabályozás minőségének javítására szolgál. Az ilyen kapcsolatokat részletesebben tárgyaljuk speciális tanfolyamok.. A szerkezetnek megfelelően (3. ábra) sokféle, egymástól alapvetően eltérő gép építhető fel. Osztályozásuk fő jellemzője a vezérlőrendszer típusa. Általánosságban elmondható, hogy a vezérlőrendszerek működési elv szerinti osztályozását a 4. ábra mutatja be.

A hurokrendszerek zártak vagy nyitottak lehetnek. A gép, amelynek felépítése és kinematikai diagramja az 1. és 2. ábrán látható, nyílt hurkú vezérléssel rendelkezik. Ezeket a gépeket gyakran "mechanikus bolondoknak" nevezik, mert addig működnek, amíg a vezérműtengely forog. A vezérlőrendszer nem ellenőrzi a technológiai folyamat paramétereit, és az egyes mechanizmusok hibás szabályozása esetén a gép továbbra is gyárt termékeket, még akkor is, ha az hibás. Néha a berendezés egy vagy több meghajtót tartalmazhat visszacsatolás nélkül (lásd a 3. meghajtót a 3. ábrán). Az 5. ábra a gép kinematikai diagramját mutatja nyílt hurkú vezérlőrendszerrel és külön meghajtókkal. Egy ilyen áramkörrel rendelkező automata csak időben vezérelhető (a munkatestek időben történő egyenletes mozgásának biztosítása érdekében) újraprogramozható vezérlővel, vezérműtengelyes vezérlőkészülékkel, tetszőleges elemalapra (pneumatikus elemek) megvalósított logikai áramkör segítségével. , relék, mikroáramkörök stb.). Az időgazdálkodás fő hátránya a gép ciklikus paramétereinek kényszerű túlbecslése, és ennek következtében a termelékenység csökkenése. Valójában az időszabályozási algoritmus elkészítésekor figyelembe kell venni a hajtások lehetséges válaszidőbeli instabilitását, ami nem szabályozott, a vezérlőparancsok kiadása közötti időintervallumok túlbecslésével. Ellenkező esetben a munkadarabok ütközése történhet, például az egyik henger löketidejének véletlen megnövekedése és a másik henger löketidejének csökkenése miatt.

Azokban az esetekben, amikor szükség van a munkatestek kiindulási és végső helyzetének szabályozására (például ütközésük elkerülése érdekében), ciklikus vezérlőrendszereket alkalmaznak helyzet-visszacsatolásokkal. A 6. ábra az ilyen vezérlőrendszerrel rendelkező gép kinematikai diagramját mutatja. Az 1...5 munkatestek válaszainak szinkronizálására szolgáló referenciajelek a 7...16 helyzetérzékelőktől származnak. Az 1. és 2. ábrán bemutatott szerkezeti és kinematikai diagrammal rendelkező géptől eltérően ennek a gépnek a ciklusa kevésbé stabil. Az első esetben az összes ciklikus paramétert (üzemi és alapjárati idők) kizárólag a vezérműtengely forgási sebessége határozza meg, a másodikban (4. és 6. ábra) pedig az egyes hengerek működési idejétől függ (az állapot függvénye). a henger és a technológiai folyamatot jellemző aktuális paraméterek ). Ez az áramkör azonban az 5. ábrán bemutatott áramkörhöz képest lehetővé teszi a gép teljesítményének növelését azáltal, hogy kiküszöböli a vezérlőparancsok kiadása közötti szükségtelen időintervallumokat.

Az összes fenti kinematikai séma ciklikus vezérlőrendszereknek felel meg. Abban az esetben, ha a gép legalább egyik hajtása helyzet-, kontúr- vagy adaptív vezérléssel rendelkezik, akkor ezt helyzet-, kontúr- vagy adaptív vezérlőrendszernek szokás nevezni.
A 7. ábra egy helyzetszabályozó rendszerű automata forgóasztalának kinematikai diagramjának részletét mutatja. Az RO forgóasztal meghajtását egy 1 házból álló elektromágnes végzi, amelyben egy 2 tekercs és egy mozgatható armatúra 3 található. Az armatúra visszatérését rugó biztosítja, a löketet ütközők korlátozzák. 5. Az armatúrára egy 6 toló van felszerelve, amely egy 7 görgőn, egy 8 karon és egy I tengelyen keresztül csatlakozik az RO forgóasztalhoz. A 8 kar 9 rugóval csatlakozik a rögzített testhez. A 10 potenciometrikus helyzetérzékelő mozgó eleme mereven kapcsolódik az armatúrához.
Amikor a 2. tekercsre feszültséget kapcsolunk, az armatúra összenyomja a rugót, és a mágneses áramkör hézagát csökkentve az RO-t egy 7 görgőből és 8 összekötőből álló egyenes láncszemmechanizmuson keresztül mozgatja. A 9 rugó biztosítja a görgő erőzárását. és a linket. A helyzetérzékelő információt nyújt a vezérlőrendszer számára a vezérlőegység aktuális koordinátáiról.

A vezérlőrendszer addig növeli az áramerősséget a tekercsben, amíg az armatúra, és ennek következtében a hozzá mereven kapcsolódó RO el nem ér egy adott koordinátát, majd a rugóerőt az elektromágneses vonóerő kiegyenlíti. Egy ilyen hajtás vezérlőrendszerének felépítése például a 8. ábrán látható módon nézhet ki.

Az SU a következőképpen működik. A programleolvasó készülék egy x 0 változót ad ki a koordináta-átalakító bemenetére, például bináris kódban kifejezve, és megfelel a motorarmatúra szükséges koordinátájának. A koordináta-átalakítók, amelyek közül az egyik egy visszacsatoló érzékelő, kimenetéről az U és U 0 feszültséget az összehasonlító készülékhez vezetjük, amely a bemenetein a feszültségkülönbséggel arányos DU hibajelet generál. A hibajel a teljesítményerősítő bemenetére kerül, amely a DU előjelétől és nagyságától függően I áramot ad ki az elektromágneses tekercsre. Ha a hibaérték nulla lesz, akkor az áram a megfelelő szinten stabilizálódik. Amint a kimeneti hivatkozás ilyen vagy olyan okból elmozdul a megadott pozícióból, az aktuális érték elkezd változni oly módon, hogy visszatér kezdő pozíció. Így, ha a vezérlőrendszer szekvenciálisan beállítja a hajtást a szoftver adathordozón rögzített M koordináták véges halmazára, akkor a hajtásnak M pozicionálási pontja lesz. A ciklikus vezérlőrendszerek általában két pozicionálási ponttal rendelkeznek minden koordinátához (minden hajtáshoz). Az első helymeghatározó rendszerekben a koordináták számát a potenciométerek száma korlátozta, amelyek mindegyike egy adott koordináta tárolására szolgált. A modern vezérlők lehetővé teszik szinte korlátlan számú pozicionálási pont megadását, tárolását és bináris kódban történő kiadását.
A 8. ábra egy tipikus elektromechanikus hajtás kinematikai diagramját mutatja kontúrvezérlő rendszerrel. Az ilyen meghajtókat széles körben használják numerikus vezérlésű gépekben. Visszacsatoló érzékelőként tachogenerátort (érzékelőt) használnak szögsebesség) 6 és inductosyn (lineáris elmozdulásérzékelő) 7. Nyilvánvaló, hogy az ábrán bemutatott mechanizmus. 8. ábra, pozicionáló rendszerrel vezérelhető (lásd 7. ábra).

Így a kinematikai diagram szerint nem lehet különbséget tenni a kontúr és a helyzetvezérlő rendszerek között. A helyzet az, hogy a kontúrvezérlő rendszerben a programozó eszköz nem koordinátahalmazt, hanem folyamatos függvényt jegyez és állít elő. Így a kontúrrendszer lényegében egy pozíciórendszer végtelen számú pozicionálási ponttal és a PO egyik pontból a másikba való átmenetének szabályozott idejével. A helyzet- és kontúrvezérlő rendszerekben van egy adaptációs elem, pl. kívülről különböző reakciókkal tudják biztosítani az RO mozgását egy adott pontra, vagy adott törvény szerinti mozgását környezet.
A gyakorlatban azonban adaptív vezérlőrendszereknek azokat a rendszereket tekintik, amelyek a környezet aktuális reakciójától függően megváltoztathatják a gép működési algoritmusát.
A gyakorlatban egy automata gép vagy automata sor tervezésekor rendkívül fontos a mechanizmus hajtások és vezérlőrendszerek kiválasztása az előzetes tervezési szakaszban. Ez a feladat több szempontú. A hajtásokat és a vezérlőrendszereket általában a következő kritériumok szerint választják ki:
n költség;
n megbízhatóság;
n karbantarthatóság;
n konstruktív és technológiai folytonosság;
n tűz- és robbanásbiztonság;
n működési zajszint;
n elektromágneses interferenciával szembeni ellenállás (a vezérlőrendszerre vonatkozik);
n kemény sugárzással szembeni ellenállás (SU-ra vonatkozik);
n súly és méret jellemzői.
Minden hajtás és vezérlőrendszer osztályozható a felhasznált energia típusa szerint. A modern technológiai gépek hajtásai általában: elektromos energiát (elektromechanikus hajtások), sűrített levegő energiát (pneumatikus hajtások), folyadékáramlási energiát (hidraulikus hajtások), vákuumenergiát (vákuumhajtások), belső égésű motoros hajtásokat használnak. Néha kombinált meghajtókat használnak a gépekben. Például: elektro-pneumatikus, pneumo-hidraulikus, elektrohidraulikus stb. Rövid összehasonlító jellemzők A hajtómotorokat az 1. táblázat tartalmazza. Ezen kívül a hajtás kiválasztásakor figyelembe kell venni az erőátviteli mechanizmust és annak jellemzőit. Tehát maga a motor lehet olcsó, de a sebességváltó drága, a motor megbízhatósága magas, de a váltószerkezet megbízhatósága alacsony stb.
A hajtástípus kiválasztásánál a legfontosabb szempont a folytonosság. Így például, ha egy újonnan tervezett gépben legalább az egyik hajtás hidraulikus, akkor érdemes elgondolkodni a hidraulika alkalmazásának lehetőségén a fennmaradó munkarészeknél. Ha először használjuk a hidraulikát, akkor emlékeznünk kell arra, hogy ehhez egy nagyon drága és tömeg- és méretparamétereket tekintve nagyméretű hidraulika állomás berendezése mellé kell beépíteni. Ugyanezt kell tenni a pneumatika esetében is. Néha nem bölcs dolog pneumatikus vezetéket fektetni, vagy akár kompresszort vásárolni egy pneumatikus hajtás érdekében egy gépben. Általában a berendezések tervezése során törekedni kell azonos típusú meghajtók használatára. Ebben az esetben a fentieken túl jelentősen leegyszerűsödik Karbantartásés javítások. Mélyebb összehasonlítás különféle típusok hajtásokat és vezérlőrendszereket csak speciális tudományágak tanulmányozása után lehet előállítani.

Kérdések az önkontrollhoz
1. Mit nevezünk technológiai folyamatautomatizálási eszköznek a termelés kapcsán?
2. Sorolja fel az automata gyártógép fő alkatrészeit!
3. Mi szolgált programhordozóként az első ciklikus automatákban?
4. Mi az automata gyártógépek fejlődése?
5. Sorolja fel a folyamatberendezésekben használt vezérlőrendszerek típusait!
6. Mi az a zárt és nyitott vezérlőrendszer?
7. Melyek a ciklikus vezérlőrendszer főbb jellemzői?
8. Mi a különbség a helyzet- és a kontúrvezérlő rendszerek között?
9. Mely vezérlőrendszereket nevezzük adaptívnak?
10. Melyek a géphajtás fő elemei?
11. Milyen szempontok szerint osztályozzák a géphajtásokat?
12. Sorolja fel a technológiai gépekben használt főbb hajtástípusokat!
13. Sorolja fel a hajtások és a vezérlőrendszerek összehasonlításának kritériumait!
14. Mondjon példát zárt ciklikus hajtásra!
Folyamat automatizálás- olyan rendszer vagy rendszerek megvalósítására kialakított módszerek és eszközök összessége, amely lehetővé teszi magának a technológiai folyamatnak az irányítását közvetlen emberi részvétel nélkül, illetve a legfelelősebb döntések meghozatalának jogát a személyre bízva.
A technológiai folyamat automatizálásának eredményeként általában egy automatizált folyamatirányító rendszer jön létre.
A technológiai folyamatok automatizálásának alapja az anyag-, energia- és információáramlás újraelosztása az elfogadott szabályozási kritérium (optimalitás) szerint.
- Részleges automatizálás - egyes eszközök, gépek, technológiai műveletek automatizálása. Akkor hajtják végre, ha a folyamatok irányítása azok összetettsége vagy átmenetisége miatt az ember számára gyakorlatilag elérhetetlen. Általános szabály, hogy a működtető berendezések részben automatizáltak. A helyi automatizálást széles körben használják az élelmiszeriparban.
- Integrált automatizálás - lehetővé teszi egy technológiai részleg, műhely vagy vállalat automatizálását, amely egyetlen automatizált komplexumként működik. Például az erőművek.
- A teljes automatizálás az automatizálás legmagasabb szintje, amelyben az összes termelés-ellenőrzési és irányítási funkció (vállalati szinten) átkerül a műszaki eszközökbe. A fejlesztés jelenlegi szintjén gyakorlatilag nem használják a teljes automatizálást, mivel a vezérlési funkciók az embereknél maradnak. Az atomenergetikai vállalkozásokat a teljes automatizáláshoz közelinek nevezhetjük.
Enciklopédiai YouTube
1 / 3
✪ A jövő szakemberei - Technológiai folyamatok és gyártás automatizálása
✪ Technológiai folyamatok automatizálása
✪ Videó előadás Az automatizálás alapfogalmai és történeti háttere
Feliratok
Automatizálási célok
A folyamatautomatizálás fő céljai:
- a kiszolgáló személyzet számának csökkentése;
- a termelési mennyiség növekedése;
- a gyártási folyamat hatékonyságának növelése;
- a termék minőségének javítása;
- a nyersanyagköltségek csökkentése;
- a termelés ritmusának növelése;
- fokozott biztonság;
- a környezetbarátság növelése;
- fokozott hatékonyság.
Automatizálási problémák és megoldásaik
A célokat az alábbi folyamatautomatizálási feladatok megoldásával érjük el:
- a szabályozás minőségének javítása;
- a berendezések rendelkezésre állási tényezőjének növelése;
- a folyamatkezelők ergonómiájának javítása;
- a gyártás során felhasznált anyagokkal kapcsolatos információk megbízhatóságának biztosítása (beleértve a katalóguskezelést is);
- információ tárolása a technológiai folyamat előrehaladásáról és a vészhelyzetekről.
A folyamatautomatizálás problémáinak megoldása a következőkkel történik:
- modern automatizálási módszerek bevezetése;
- modern automatizálási eszközök bevezetése.
A technológiai folyamatok egy gyártási folyamaton belüli automatizálása lehetővé teszi a termelésirányítási rendszerek és a vállalatirányítási rendszerek megvalósításának alapjainak megszervezését.
A különböző megközelítések miatt a következő technológiai folyamatok automatizálását különböztetjük meg:
- folyamatos technológiai folyamatok automatizálása (Process Automation);
- diszkrét technológiai folyamatok automatizálása (Factory Automation);
- hibrid technológiai folyamatok automatizálása (Hybrid Automation).
Megjegyzések
A gyártás automatizálása megbízható, viszonylag egyszerű tervezésű és vezérlésű gépek jelenlétét feltételezi. mechanizmusok és készülékek.
Irodalom
L. I. Selevtsov, Technológiai folyamatok automatizálása. Tankönyv: "Akadémia" Kiadóközpont
V. Yu. Shishmarev, Automatizálás. Tankönyv: "Akadémia" Kiadóközpont
A munkatermelékenység növelésének leghatékonyabb módja az automatizálás széles körű megvalósítása.
Számos létesítményben a megfelelő technológiai folyamat megszervezéséhez hosszú ideig meg kell őrizni a különböző fizikai paraméterek beállított értékeit, vagy bizonyos törvények szerint idővel módosítani kell azokat. Különböző miatt külső hatások objektumonként ezek a paraméterek eltérnek a megadottaktól. A kezelőnek vagy a járművezetőnek úgy kell befolyásolnia az objektumot, hogy a szabályozott paraméterek értéke ne lépje túl az elfogadható határokat, azaz irányítsa az objektumot. Az egyes kezelői funkciókat különféle automata készülékek hajthatják végre. Az objektumra gyakorolt hatásukat egy olyan személy parancsára hajtják végre, aki figyeli a paraméterek állapotát. Ezt a típusú vezérlést automatikusnak nevezik. Ahhoz, hogy egy személyt teljesen kizárjunk a vezérlési folyamatból, a rendszert le kell zárni: az eszközöknek figyelniük kell a szabályozott paraméter eltérését, és ennek megfelelően parancsot kell adniuk az objektum vezérlésére. Az ilyen zárt vezérlőrendszert automatikus vezérlőrendszernek (ACS) nevezik.
A 18. század második felében jelentek meg az első egyszerű automatikus vezérlőrendszerek a folyadékszint, a gőznyomás és a forgási sebesség meghatározott értékeinek fenntartására. a gőzgépek fejlesztésével. Az első automatikus szabályozók létrehozása intuitív volt, és az egyes feltalálók érdeme volt. Az automatizálási eszközök továbbfejlesztéséhez szükség volt az automatikus szabályozók számítási módszereire. Már a 19. század második felében. létrejött az automatikus vezérlés matematikai módszereken alapuló harmonikus elmélete. D.K. Maxwell „On Regulators” (1866) és I.A. Vyshnegradsky „A szabályozók általános elméletéről” (1876), „A közvetlen hatású szabályozókról” (1876) a szabályozókat és a szabályozás tárgyát először tekintik egyetlen dinamikus rendszernek. Az automatikus szabályozás elmélete folyamatosan bővül és mélyül.
Az automatizálás fejlesztésének jelenlegi szakaszát az automatikus vezérlési feladatok jelentős bonyolítása jellemzi: a szabályozott paraméterek számának növekedése és a szabályozott objektumok összekapcsolása; a szükséges vezérlési pontosság és sebesség növelése; a távvezérlés növelése stb. Ezeket a problémákat csak a modern elektronikai technika, a mikroprocesszorok és az univerzális számítógépek széles körű bevezetése alapján lehet megoldani.
Az automatizálás széleskörű bevezetése a hűtőberendezésekben csak a 20. században kezdődött, de már a 60-as években létrejöttek a nagyméretű, teljesen automatizált egységek.
A különféle technológiai folyamatok irányításához meghatározott határokon belül kell tartani, és néha egy bizonyos törvény szerint módosítani kell egy vagy több fizikai mennyiség értékét egyidejűleg. Ebben az esetben gondoskodni kell arról, hogy ne álljanak elő veszélyes üzemi körülmények.
Azt az eszközt, amelyben folyamatos szabályozást igénylő folyamat játszódik le, irányított objektumnak, vagy röviden tárgynak nevezzük (1a. ábra).
Azt a fizikai mennyiséget, amelynek értéke nem léphet túl bizonyos határokat, szabályozott vagy állítható paraméternek nevezzük, és X betűvel jelöljük. Ez lehet t hőmérséklet, p nyomás, H folyadékszint, relatív páratartalom? stb. A vezérelt paraméter kezdeti (beállított) értékét X 0-val jelöljük. A tárgyat érő külső hatások eredményeként valódi értéket X eltérhet a megadott X 0 értéktől. A szabályozott paraméter kezdeti értékétől való eltérésének mértékét mismatch-nek nevezzük:
Az objektumra gyakorolt külső hatást, amely független a kezelőtől és növeli az eltérést, terhelésnek nevezzük, és Mn-nek (vagy QH-nak) nevezzük. arról beszélünk hőterhelésről).
Az eltolódások csökkentése érdekében hatást kell gyakorolni a terheléssel ellentétes tárgyra. Az objektumra gyakorolt szervezett befolyást, amely csökkenti az eltérést, szabályozó hatásnak nevezzük - M p (vagy Q P - termikus hatás esetén).
Az X paraméter értéke (különösen X 0) csak akkor marad állandó, ha a szabályozási művelet megegyezik a terheléssel:
X = const csak M p = M n esetén.
Ez a szabályozás (kézi és automatikus) alaptörvénye. A pozitív eltérés csökkentése érdekében szükséges, hogy M p abszolút értékben nagyobb legyen, mint M n. És fordítva, az M p<М н рассогласование увеличивается.
Automatikus rendszerek. Kézi szabályozásnál a szabályozó hatás megváltoztatásához a vezetőnek időnként számos műveletet kell végrehajtania (szelepek nyitása vagy zárása, szivattyúk, kompresszorok indítása, teljesítményük megváltoztatása stb.). Ha ezeket a műveleteket automatikus eszközök végzik egy személy parancsára (például a "Start" gomb megnyomásával), akkor ezt a műveleti módot automatikus vezérlésnek nevezik. Egy ilyen vezérlés összetett sémája látható az ábrán. 1, b, Az 1., 2., 3. és 4. elem az egyik fizikai paramétert egy másikká alakítja át, így kényelmesebb a következő elemhez való átvitel. A nyilak mutatják a hatás irányát. Az automatikus vezérlés X vezérlésének bemeneti jele lehet egy gombnyomás, a reosztát fogantyújának mozgatása stb. A továbbított jel teljesítményének növelése érdekében az egyes elemekhez további E energiát lehet juttatni.
Egy objektum vezérléséhez a vezetőnek (operátornak) folyamatosan információt kell kapnia az objektumtól, azaz ellenőrzést kell végeznie: meg kell mérnie a vezérelt X paraméter értékét, és ki kell számítania az X eltérés értékét. Ez a folyamat automatizálható is (automatikus vezérlés), azaz olyan eszközöket telepíthet, amelyek megjelenítik, rögzítik az "X" értéket, vagy adnak jelet, amikor az X meghaladja az elfogadható határokat.
Az objektumtól (5-7. lánc) kapott információt visszacsatolásnak, az automatikus vezérlést pedig közvetlen kommunikációnak nevezzük.
Az automatikus vezérlés és az automatikus vezérlés esetén a kezelőnek csak rá kell néznie az eszközökre, és meg kell nyomnia egy gombot. Lehetséges-e automatizálni ezt a folyamatot úgy, hogy teljesen mellőzzük az operátort? Kiderül, hogy elegendő az X automatikus vezérlő kimeneti jelet az automatikus vezérlő bemenetre (az 1. elemre) irányítani, hogy a vezérlési folyamat teljesen automatizálódjon. Ebben az esetben az 1. elem összehasonlítja az X k jelet a megadott X 3 jellel. Minél nagyobb az eltérés X, annál nagyobb az X és -X 3 különbség, és ennek megfelelően nő az M r szabályozó hatása.
A zárt befolyási körrel rendelkező automatikus vezérlőrendszereket, amelyekben a vezérlési művelet az eltéréstől függően jön létre, automatikus vezérlőrendszernek (ACS) nevezik.
Az automatikus vezérlőelemek (1--4) és a felügyelet (5--7) az áramkör zárásakor automatikus szabályozót alkotnak. Így az automatikus vezérlőrendszer egy tárgyból és egy automatikus vezérlőből áll (1. ábra, c). Az automatikus szabályozó (vagy egyszerűen csak egy szabályozó) olyan eszköz, amely érzékeli az eltérést, és úgy hat egy tárgyra, hogy csökkentse ezt az eltérést.
Az objektum befolyásolásának célja alapján a következő vezérlőrendszereket különböztetjük meg:
a) stabilizáló,
b) szoftver,
c) követői
d) optimalizálás.
A stabilizáló rendszerek a szabályozott paraméter értékét állandó szinten tartják (meghatározott határokon belül). Beállításaik állandóak.
Szoftver rendszerek a vezérlőknek van egy beállítása, amely az adott programnak megfelelően idővel változik.
BAN BEN nyomkövető rendszerek a beállítás valamilyen külső tényezőtől függően folyamatosan változik. A légkondicionáló rendszerekben például kifizetődőbb meleg napokon magasabb szobahőmérsékletet fenntartani, mint hideg napokon. Ezért célszerű a külső hőmérséklet függvényében folyamatosan módosítani a beállítást.
BAN BEN rendszerek optimalizálása A vezérlő által az objektumtól és a külső környezettől kapott információk előfeldolgozásra kerülnek, hogy meghatározzák a vezérelt paraméter legkedvezőbb értékét. A beállítás ennek megfelelően változik.
A szabályozott X0 paraméter beállított értékének fenntartásához az automatikus vezérlőrendszereken kívül esetenként automatikus terhelésfigyelő rendszert is alkalmaznak (1d. ábra). Ebben a rendszerben a vezérlő a terhelés változásait érzékeli, nem az eltérést, biztosítva a folyamatos egyenlőséget M p = M n. Elméletileg ez pontosan biztosítja, hogy X 0 = állandó. Gyakorlatilag azonban a vezérlőelemeket érő különféle külső hatások (interferencia) miatt az M R = M n egyenlőség sérülhet. Az ebben az esetben fellépő mismatch?X lényegesen nagyobbnak bizonyul, mint az automata vezérlőrendszerben, mivel a terhelésfigyelő rendszerben nincs visszacsatolás, azaz nem reagál az eltérésre?X.
Összetett automata rendszerekben (1. ábra, e) a fő áramkörökkel (közvetlen és visszacsatoló) együtt további előremenő és visszacsatoló áramkörök is lehetnek. Ha a kiegészítő lánc iránya egybeesik a fővel, akkor egyenesnek nevezzük (1. és 4. lánc); ha a hatások irányai nem esnek egybe, akkor további visszacsatolás következik be (2. és 3. lánc). Az automata rendszer bemenete a beállítási művelet, a kimenet pedig a szabályozott paraméter.
A paraméterek meghatározott határokon belüli automatikus tartása mellett szükséges a létesítmények veszélyes körülményektől való védelme is, amelyet automatikus védelmi rendszerek (APS) hajtanak végre. Lehetnek megelőző vagy vészhelyzeti jellegűek.
A megelőző védelem a vezérlőberendezéseket vagy a szabályozó egyes elemeit érinti a veszélyes üzemmód kezdete előtt. Például, ha a kondenzátor vízellátása megszakad, a kompresszort le kell állítani anélkül, hogy megvárná a nyomás vésznövekedését.
A vészvédelem érzékeli a szabályozott paraméter eltérését, és ha annak értéke veszélyessé válik, kikapcsolja az egyik rendszercsomópontot, így az eltérés már nem nő. Az automatikus védelem bekapcsolásakor az automatikus vezérlőrendszer normál működése leáll, és a szabályozott paraméter általában túllép az elfogadható határokon. Ha a védelem kioldása után a szabályozott paraméter visszatér a megadott zónába, az EPS újra bekapcsolhatja a letiltott egységet, és a vezérlőrendszer továbbra is normálisan működik (újrafelhasználható védelem).
Nagy létesítményeknél gyakrabban alkalmazzák az egyszeres működésű önvédelmi védelmet, azaz miután a szabályozott paraméter visszatér a megengedett zónába, maguk a védelem által letiltott csomópontok már nem kapcsolódnak be.

A SAZ-t általában riasztással kombinálják (általános vagy differenciált, azaz jelzi a kioldás okát). Az automatizálás előnyei. Az automatizálás előnyeinek azonosításához példaként hasonlítsuk össze a hűtőkamra hőmérséklet-változásainak grafikonjait kézi és automatikus vezérléssel (2. ábra). A kamrában a kívánt hőmérséklet 0 és 2°C között legyen. Amikor a hőmérséklet eléri a 0°C-ot (1. pont), a vezető leállítja a kompresszort. A hőmérséklet emelkedni kezd, és amikor körülbelül 2°C-ra emelkedik, a vezető ismét bekapcsolja a kompresszort (2. pont). A grafikonon látható, hogy a kompresszor idő előtti indítása vagy leállása miatt a kamra hőmérséklete meghaladja a megengedett határértékeket (3., 4., 5. pont). A hőmérséklet gyakori emelkedésével (A szakasz) csökken a megengedett eltarthatóság, és romlik a romlandó termékek minősége. Az alacsony hőmérséklet (B szakasz) a termékek kiszáradását okozza, és néha csökkenti az ízüket; Ezenkívül a kompresszor további munkája elektromos áramot és hűtővizet pazarol, ami a kompresszor idő előtti kopását okozza.
Automatikus vezérlés esetén a hőmérsékletrelé bekapcsol és leállítja a kompresszort 0 és +2 °C-on.
Az eszközök az alapvető védelmi funkciókat is megbízhatóbban látják el, mint az emberek. Előfordulhat, hogy a vezető nem észleli a kondenzátorban a nyomás gyors növekedését (a vízellátás kiesése miatt), az olajszivattyú meghibásodását stb., de a készülékek azonnal reagálnak ezekre a hibákra. Igaz, bizonyos esetekben a problémákat nagyobb valószínűséggel veszi észre a vezető: kopogást fog hallani a hibás kompresszorban, és helyi ammóniaszivárgást érez. Ennek ellenére az üzemeltetési tapasztalatok azt mutatják, hogy az automata telepítések sokkal megbízhatóbban működnek.
Így az automatizálás a következő fő előnyöket nyújtja:
1) csökken a karbantartásra fordított idő;
2) a szükséges technológiai rendszert pontosabban tartják fenn;
3) csökkennek a működési költségek (villany, víz, javítás stb.);
4) a berendezések megbízhatósága nő.
A felsorolt előnyök ellenére az automatizálás csak olyan esetekben célszerű, ha az gazdaságilag indokolt, azaz az automatizálással járó költségeket ellensúlyozzák a megvalósításból származó megtakarítások. Emellett szükséges az olyan folyamatok automatizálása, amelyek normál működése kézi vezérléssel nem biztosítható: precíz technológiai folyamatok, veszélyes vagy robbanásveszélyes környezetben végzett munka.
Az automatizálási folyamatok közül az automatikus szabályozásnak van a legnagyobb gyakorlati jelentősége. Ezért a továbbiakban elsősorban az automata vezérlőrendszereket vesszük figyelembe, amelyek a hűtőegységek automatizálásának alapját képezik.
Irodalom
1. Technológiai folyamatok automatizálása az élelmiszergyártásban / Szerk. E. B. Karpina.
2. Automata készülékek, szabályozók és vezérlőgépek: Kézikönyv / Szerk. B. D. Kosarsky.
3. Petrov. I. K., Soloshchenko M. N., Tsarkov V. N. Eszközök és automatizálási berendezések az élelmiszeripar számára: Kézikönyv.
4. Az élelmiszeripar technológiai folyamatainak automatizálása. Szokolov.